")
")

Sound Map
SAMURAI™-Option
Sound Field Mapping
Visualization of Sound Intensity Distribution

Overview
Application
This SAMURAI ™ option is used to localize stationary sound sources.
It is used, for example, in building acoustics when examining passive elements in buildings. For example, if the sound insulation between rooms or the facade is not fully achieved, the problem of searching for the causes and possible solutions inevitably arises.
Another use case could be the examination of machines with the aim of separating individual sound sources.
Description
This option maps sound pressure and sound intensity information of stationary noises over a visual measuring surface. The simple assignment of the measurement data by evaluating a video that is shot during the measurement process eliminates the time-consuming design of a real grid or positioning system over the measurement area, which was previously necessary with conventional method. Since the position of the sound intensity probe or the microphone does not have to be detected automatically, no special additional hardware is required except for a standard webcam.
While scanning the measuring surface with a microphone or a conventional sound intensity probe, the position is recorded by a stationary camera. The measuring surface can optionally be divided into any grid as the operator sees fit. The positions are then assigned manually by evaluating the recorded video after the measurement is concluded. Depending on the number points, the location result and special resolution can be approximated iteratively.
At the end of the manual assignment, the operator is shown the final result of the mapping algorithm in form of a sound pressure map and sound intensity map for both octave and FFT spectra. A frequency band can also be freely selected using the cursor.

Figure 1:
Principle of the sound intensity measurement with a USB camera.
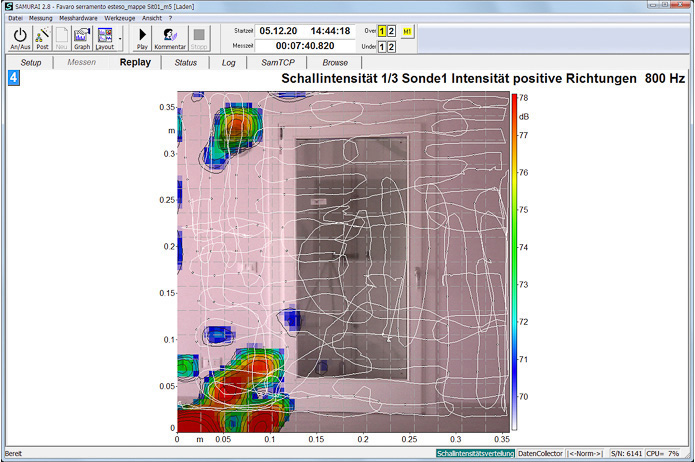
Figure 2:
Mapping of the sound intensity with scan track of the manually assigned measurement points.
Figure 3:
Measurement of the sound insulation of a door with mapping of the sound intensity. 200 Hz I shown.
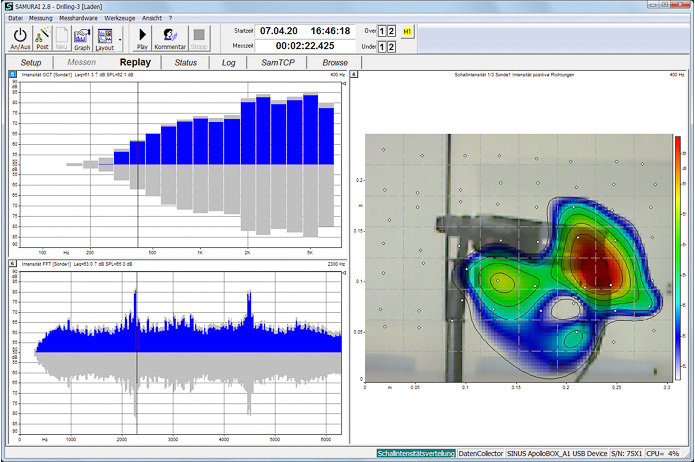
Figure 4:
Sound source location on a machine with mapping of the sound intensity. 400 Hz is shown (octave spectrum).
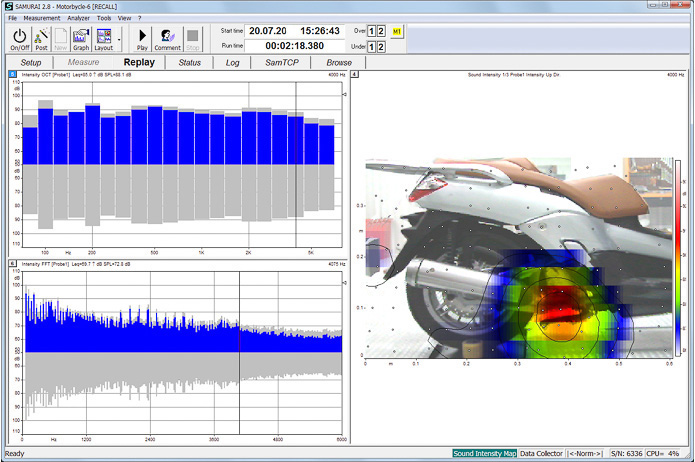
Figure 5:
Sound source location on a motorcycle with mapping of the sound intensity. 4000 Hz is shown (FFT spectrum).
Features
- Innovative solution for the effective localization of sound sources in stationary sound fields using conventional microphones or sound intensity probes
- Acquisition, display and storage of the sensor position by using a simple USB camera
- Aufbau eines „Daten-Sammlers“ ist frei konfigurierbar
- Mapping of sound pressure and sound intensity with octave and/or FFT spectra
Requirements
A valid SAMURAI ™ base license and the SAMURAI ™ Noisecam Video option is required. If the sound intensity is to be mapped, the SAMURAI ™ option Intensity is necessary as well.